No More Codes
2016年12月22日 星期四
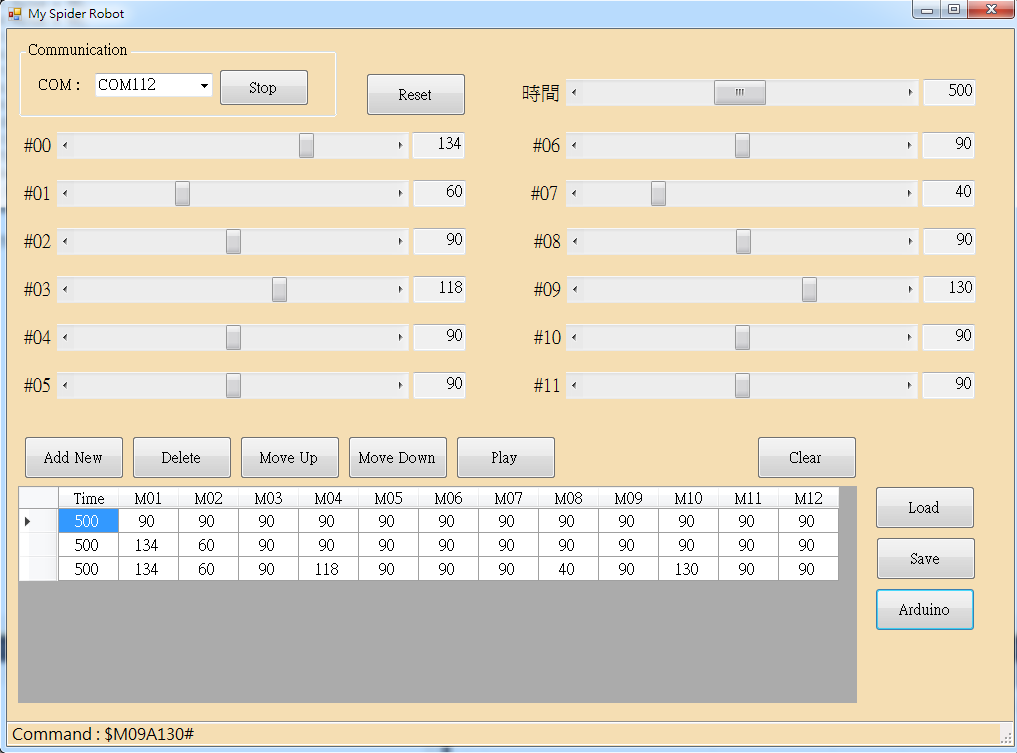
六足機器人 – PC端動作編輯程式
這是用
C#
寫成的六足機器人動作編輯程式
,每個動作是由一個時間與
12
個馬達角度所構成,
使用橫向卷軸控制
每個動作的設定,下方的
Add
按鈕將動作新增至表格中,
Delete/Move…
等按鈕對表格內容進行編輯,
Play
按鈕則開始重複循環的動作播放,右方的
Load
與
Save
可將表格內容存檔,
Arduino
按鈕會產生
C
語言檔案,可複製貼上至
SimpleRobot
的
Arduino
程式內。
閱讀更多 »
六足機器人 – 接收馬達控制指令
這是給
Pizg Chen
與
Bridan Wang(
http://4rdp.blogspot.tw/2015/12/rosa-18-p-6-x-2-spider.html
)
六足機器人的程式
,可接收馬達控制指令,控制馬達的角度。指令的格式為
$MmmAaaa#
,
mm
是馬達編號
(00~11)
,
aaa
是馬達角度
(000~180)
,例如
$M00A120#
會令馬達
0
轉動到
120
度的位置。
閱讀更多 »
六足機器人 – 做出一個最簡單的動作
這是給
Pizg Chen
與
Bridan Wang(
http://4rdp.blogspot.tw/2015/12/rosa-18-p-6-x-2-spider.html
)
六足機器人做出一個動作的簡單程式
,六隻腳
12
個馬達,分別接到
servoPin[]
指定的
12
的
pin
。
閱讀更多 »
較新的文章
較舊的文章
首頁
訂閱:
意見 (Atom)