No More Codes
2016年12月22日 星期四
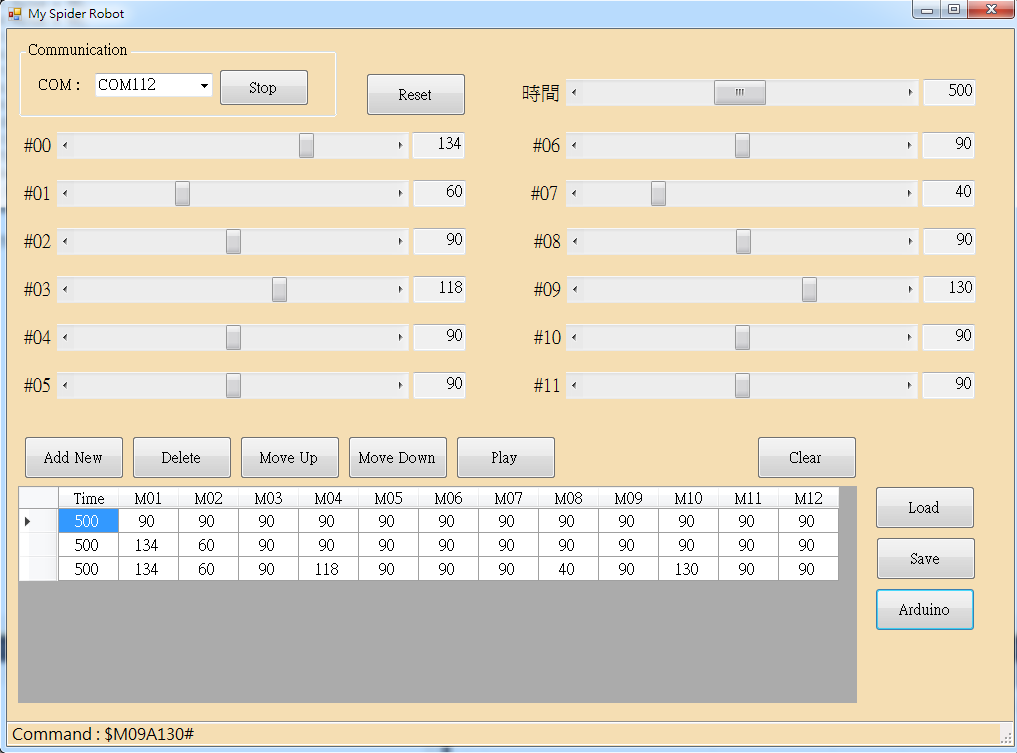
六足機器人 – PC端動作編輯程式
這是用
C#
寫成的六足機器人動作編輯程式
,每個動作是由一個時間與
12
個馬達角度所構成,
使用橫向卷軸控制
每個動作的設定,下方的
Add
按鈕將動作新增至表格中,
Delete/Move…
等按鈕對表格內容進行編輯,
Play
按鈕則開始重複循環的動作播放,右方的
Load
與
Save
可將表格內容存檔,
Arduino
按鈕會產生
C
語言檔案,可複製貼上至
SimpleRobot
的
Arduino
程式內。
閱讀更多 »
六足機器人 – 接收馬達控制指令
這是給
Pizg Chen
與
Bridan Wang(
http://4rdp.blogspot.tw/2015/12/rosa-18-p-6-x-2-spider.html
)
六足機器人的程式
,可接收馬達控制指令,控制馬達的角度。指令的格式為
$MmmAaaa#
,
mm
是馬達編號
(00~11)
,
aaa
是馬達角度
(000~180)
,例如
$M00A120#
會令馬達
0
轉動到
120
度的位置。
閱讀更多 »
六足機器人 – 做出一個最簡單的動作
這是給
Pizg Chen
與
Bridan Wang(
http://4rdp.blogspot.tw/2015/12/rosa-18-p-6-x-2-spider.html
)
六足機器人做出一個動作的簡單程式
,六隻腳
12
個馬達,分別接到
servoPin[]
指定的
12
的
pin
。
閱讀更多 »
2016年11月22日 星期二
自動抓取RMT的圖檔
RMT
的公開資料
,
是從自由場
(
加速度感測器
)
取得
,主要是用來計算地震當下的參數。從好幾次的觀察經驗得知,出震前
1
天到幾個小時,會有一些特殊的特徵波型,尤其是越大的地震會越明顯。目前中研院只用瞬間或很短的時間資料來計算,沒有用到震前幾小時的資料,因此可以研究一下如何利用這些資料來計算震前的現象。
閱讀更多 »
2016年9月26日 星期一
更改水平0軸的畫線方式
原本畫水平
0
軸線會畫在訊號後方
,
當訊號都是水平時會看不到
0
軸線
,
這次修改將
0
軸線畫在訊號前方
閱讀更多 »
2016年9月21日 星期三
AirView 資料存檔功能更新
說明:
1.
Arduino
的輸出增加極大
(
小
)
值發生時的
A0
與
A1
值
,
共
3
個資料。
2.
AirView
程式接收
3
個資料存檔
,且劃出水平
0
軸,便於長時間觀察
。
3
多個
Arduino
同時進行觀測時
,
請修改
runningNumber的值
。
閱讀更多 »
2016年9月5日 星期一
AirView 新增資料存檔功能
說明
:
1.
AirView
新增資料存檔功能
,紅字為修改部分,可套用未來版本
2.
目前
AirView
程式雖有記錄
time tag
,但尚未使用,且林所長只看最高最低點,資料亦已被壓縮,因
processing
未支援秒以下的小數點,為避免資料存檔的時間混淆,將
Arduino
端的程式改成
1000ms
送
2
筆。
3.
套用時請將原本的
rootDir="D:\\Earthquake Re
s
earch\\SampledData\\"
改成自己欲存檔的目錄
。
閱讀更多 »
較新的文章
較舊的文章
首頁
訂閱:
文章 (Atom)