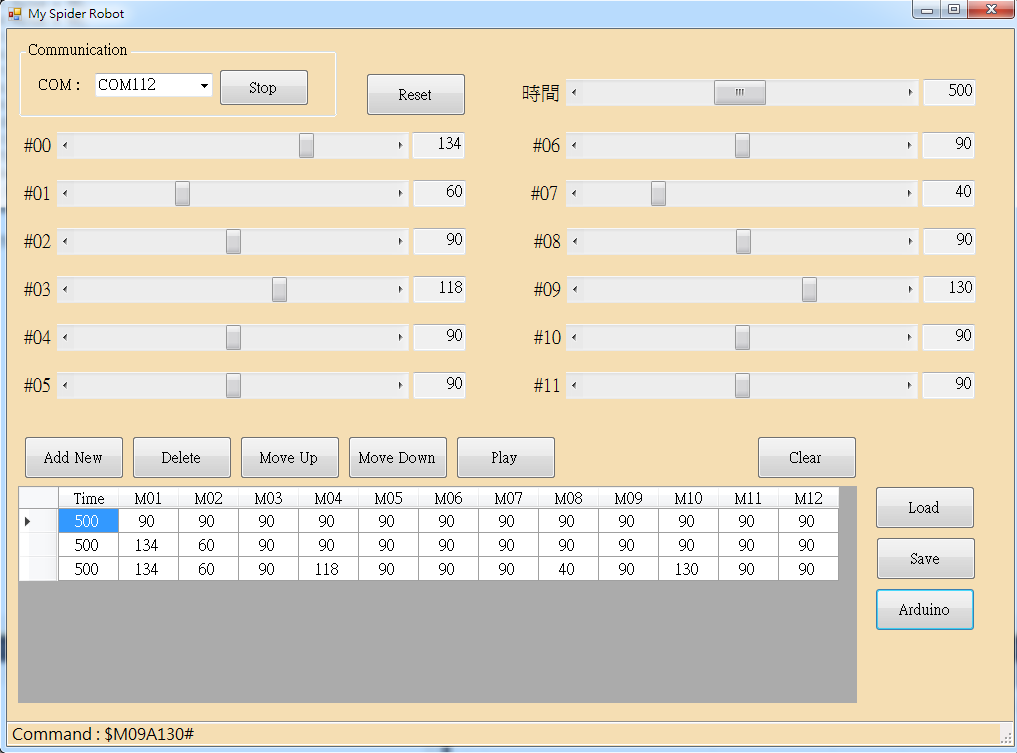
這是用C#寫成的六足機器人動作編輯程式,每個動作是由一個時間與12個馬達角度所構成,使用橫向卷軸控制每個動作的設定,下方的Add按鈕將動作新增至表格中,Delete/Move…等按鈕對表格內容進行編輯,Play按鈕則開始重複循環的動作播放,右方的Load與Save可將表格內容存檔,Arduino按鈕會產生C語言檔案,可複製貼上至SimpleRobot的Arduino程式內。
此程式需配合CommandRobot的Arduino程式來使用,先燒錄CommandRobot程式,使用本程式編輯完成後,再將產生的程式碼取代SimpleRobot的動作陣列即可。因動作過多時,陣列資料太大會無法放入RAM,但Arduino的Flash只支援一維資料的存取,因此程式碼使用一維陣列儲存,減少未來改放至Flash時修改程式存取料的麻煩。
原始程式Github: https://github.com/ghostyguo/SpiderRobotFun
|
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Windows.Forms;
using System.IO.Ports;
using System.IO;
using System.Diagnostics;
namespace MySpiderRobot
{
public partial class MySpiderForm
: Form
{
HScrollBar[] angleSlider;
TextBox[] angleValue;
DataTable commandTable;
public MySpiderForm()
{
InitializeComponent();
}
private void
MySpiderForm_Load(object sender, EventArgs e)
{
RefreshPortList();
UI_Init();
}
void UI_Init()
{
angleSlider = new HScrollBar[12];
angleSlider[0]
= hScrollBar0;
angleSlider[1] = hScrollBar1;
angleSlider[2] = hScrollBar2;
angleSlider[3] = hScrollBar3;
angleSlider[4] = hScrollBar4;
angleSlider[5] = hScrollBar5;
angleSlider[6]
= hScrollBar6;
angleSlider[7] = hScrollBar7;
angleSlider[8] = hScrollBar8;
angleSlider[9] = hScrollBar9;
angleSlider[10] = hScrollBar10;
angleSlider[11] = hScrollBar11;
angleValue
= new TextBox[12];
angleValue[0] = textBox0;
angleValue[1] = textBox1;
angleValue[2] = textBox2;
angleValue[3] = textBox3;
angleValue[4] = textBox4;
angleValue[5] = textBox5;
angleValue[6] = textBox6;
angleValue[7] = textBox7;
angleValue[8] = textBox8;
angleValue[9] = textBox9;
angleValue[10] = textBox10;
angleValue[11] = textBox11;
commandTable = new DataTable("Data");
DataView DataView = new
DataView(commandTable);
gridViewCommand.DataSource = DataView;
//gridViewCommand.RowHeadersVisible = false;
//gridViewCommand.ColumnHeadersVisible = false;
commandTable.Columns.Add(new DataColumn("Time",
typeof(int)));
gridViewCommand.Columns[0].HeaderCell.Style.Alignment = DataGridViewContentAlignment.MiddleCenter;
gridViewCommand.Columns[0].Width = 60;
for (int i = 1; i <= 12; i++)
{
commandTable.Columns.Add(new DataColumn(String.Format("M{0:00}",i), typeof(int)));
gridViewCommand.Columns[i].HeaderCell.Style.Alignment = DataGridViewContentAlignment.MiddleCenter;
gridViewCommand.Columns[i].Width = 60;
}
}
void RefreshPortList()
{
string[] ports = SerialPort.GetPortNames();
cbPortList.Items.Clear();
cbPortList.Items.Add("Refresh");
if (ports.Length > 0)
{
foreach (string
port in ports)
{
cbPortList.Items.Add(port);
}
cbPortList.Text = cbPortList.Items[0].ToString(); //預設值
}
else
{
toolStripMessage.Text = "COM Port not
found";
}
}
private int
angleToWidth(int angle)
{
if (angle>=0 && angle<180) {
return (angle * 10 + 600);
} else {
return 1500; //middle
}
}
private void
Update_UI_Angle(int id=-1)
{
if (id < 0) //all
{
for (int i = 0; i < angleSlider.Count(); i++)
{
angleValue[i].Text = ((radioAngle.Checked) ? angleSlider[i].Value :
angleToWidth(angleSlider[i].Value)).ToString();
}
}
else if ((id >=
0) && id < angleValue.Count())
{
angleValue[id].Text = ((radioAngle.Checked) ? angleSlider[id].Value :
angleToWidth(angleSlider[id].Value)).ToString();
}
else
{
angleValue[id].Text = ((radioAngle.Checked) ? 90 :
angleToWidth(90)).ToString();
}
}
private void
Update_UI_Time()
{
textBoxTime.Text = (hScrollBarTime.Value * 20).ToString();
}
private String motorCommand(int id)
{
if ((id >= 0) && id <
angleValue.Count())
{
return ((radioAngle.Checked) ? String.Format("$M{0:00}A{1:000}#",
id, angleSlider[id].Value)
: String.Format("$M{0:00}W{1:0000}#",
id,angleToWidth(angleSlider[id].Value)));
} else {
return ((radioAngle.Checked) ? String.Format("$M{0:00}A{1:000}#",
90)
: String.Format("$M{0:00}W{1:0000}#",
angleToWidth(90)));
}
}
private void
sendCommand(String command)
{
try
{
serialPort.Write(command);
toolStripMessage.Text = "Command :
" + command; //successful
}
catch
{
}
}
private void
btnStart_Click(object sender, EventArgs e)
{
// 連接埠
if (btnStart.Text == "Start")
{
if (cbPortList.Text == "Refresh")
{
RefreshPortList();
toolStripMessage.Text = "Port List is
Refreshed";
return;
}
serialPort = new SerialPort(cbPortList.Text, 9600);
try
{
serialPort.Open();
}
catch
{
toolStripMessage.Text = "Cannot Open
Port";
return;
}
if (serialPort.IsOpen)
{
hScrollBar0.Enabled = true;
hScrollBar1.Enabled = true;
hScrollBar2.Enabled = true;
hScrollBar3.Enabled = true;
hScrollBar4.Enabled = true;
hScrollBar5.Enabled = true;
hScrollBar6.Enabled = true;
hScrollBar7.Enabled = true;
hScrollBar8.Enabled = true;
hScrollBar9.Enabled = true;
hScrollBar10.Enabled = true;
hScrollBar11.Enabled = true;
hScrollBarTime.Enabled = true;
for (int
id = 0; id < 12; id++)
{
sendCommand(motorCommand(id));
}
btnStart.Text = "Stop";
toolStripMessage.Text = "Port is
Opened";
}
else
{
toolStripMessage.Text = "Port is not
Opened";
return;
}
}
else if
(btnStart.Text == "Stop")
{
serialPort.Close();
serialPort = null;
hScrollBar0.Enabled = false;
hScrollBar1.Enabled = false;
hScrollBar2.Enabled = false;
hScrollBar3.Enabled = false;
hScrollBar4.Enabled = false;
hScrollBar5.Enabled = false;
hScrollBar6.Enabled = false;
hScrollBar7.Enabled = false;
hScrollBar8.Enabled = false;
hScrollBar9.Enabled = false;
hScrollBar10.Enabled = false;
hScrollBar11.Enabled = false;
hScrollBarTime.Enabled = false;
timerPlay.Enabled = false;
btnStart.Text = "Start";
}
else
{
toolStripMessage.Text = "Start Button
Error";
return;
}
}
private void
hScrollBar0_Scroll(object sender, ScrollEventArgs e)
{
Update_UI_Angle(0);
sendCommand(motorCommand(0));
}
private void
hScrollBar1_Scroll(object sender, ScrollEventArgs e)
{
Update_UI_Angle(1);
sendCommand(motorCommand(1));
}
private void
hScrollBar2_Scroll(object sender, ScrollEventArgs e)
{
Update_UI_Angle(2);
sendCommand(motorCommand(2));
}
private void
hScrollBar3_Scroll(object sender, ScrollEventArgs e)
{
Update_UI_Angle(3);
sendCommand(motorCommand(3));
}
private void hScrollBar4_Scroll(object sender, ScrollEventArgs
e)
{
Update_UI_Angle(4);
sendCommand(motorCommand(4));
}
private void
hScrollBar5_Scroll(object sender, ScrollEventArgs e)
{
Update_UI_Angle(5);
sendCommand(motorCommand(5));
}
private void
hScrollBar6_Scroll(object sender, ScrollEventArgs e)
{
Update_UI_Angle(6);
sendCommand(motorCommand(6));
}
private void
hScrollBar7_Scroll(object sender, ScrollEventArgs e)
{
Update_UI_Angle(7);
sendCommand(motorCommand(7));
}
private void
hScrollBar8_Scroll(object sender, ScrollEventArgs e)
{
Update_UI_Angle(8);
sendCommand(motorCommand(8));
}
private void
hScrollBar9_Scroll(object sender, ScrollEventArgs e)
{
Update_UI_Angle(9);
sendCommand(motorCommand(9));
}
private void
hScrollBar10_Scroll(object sender, ScrollEventArgs e)
{
Update_UI_Angle(10);
sendCommand(motorCommand(10));
}
private void
hScrollBar11_Scroll(object sender, ScrollEventArgs e)
{
Update_UI_Angle(11);
sendCommand(motorCommand(11));
}
private void
hScrollBarTime_Scroll(object sender, ScrollEventArgs e)
{
Update_UI_Time();
}
private void
radioAngle_CheckedChanged(object sender, EventArgs e)
{
Update_UI_Angle();
}
private void
radioPulseWidth_CheckedChanged(object sender,
EventArgs e)
{
Update_UI_Angle();
}
int SelectedRowIndex = 0;
private void
gridViewCommand_RowEnter(object sender, DataGridViewCellEventArgs e)
{
SelectedRowIndex = e.RowIndex;
toolStripMessage.Text = "選擇第" + SelectedRowIndex.ToString() + "列";
}
private void btnAddNew_Click(object sender, EventArgs
e)
{
commandTable.Rows.Add();
DataRow row =
commandTable.Rows[commandTable.Rows.Count - 1];
row[0] = Convert.ToInt16(textBoxTime.Text);
for (int i = 0; i
<12; i++)
{
row[i+1] = angleSlider[i].Value;
}
}
private void
btnDelete_Click(object sender, EventArgs e)
{
commandTable.Rows[SelectedRowIndex].Delete();
}
private void
btnMoveUp_Click(object sender, EventArgs e)
{
if (SelectedRowIndex == 0)
return;
DataRow SourceRow =
commandTable.Rows[SelectedRowIndex];
DataRow TargetRow = commandTable.Rows[SelectedRowIndex
- 1];
for (int i = 0; i
< 12; i++)
{
try
{
int temp = (int)TargetRow[i];
TargetRow[i] = SourceRow[i];
SourceRow[i] = temp;
}
catch
{
//不理會資料錯誤, 有可能是空白資料引起
}
}
gridViewCommand.Rows[SelectedRowIndex].Selected = false;
gridViewCommand.Rows[SelectedRowIndex - 1].Selected = true;
gridViewCommand.CurrentCell = gridViewCommand.Rows[SelectedRowIndex -
1].Cells[0];
}
private void
btnMoveDown_Click(object sender, EventArgs e)
{
if (SelectedRowIndex == commandTable.Rows.Count -
1)
return;
DataRow SourceRow =
commandTable.Rows[SelectedRowIndex];
DataRow TargetRow =
commandTable.Rows[SelectedRowIndex+1];
for (int i = 0; i
< 12; i++)
{
try
{
int temp = (int)TargetRow[i];
TargetRow[i] = SourceRow[i];
SourceRow[i] = temp;
}
catch
{
//不理會資料錯誤, 有可能是空白資料引起
}
}
gridViewCommand.Rows[SelectedRowIndex].Selected = false;
gridViewCommand.Rows[SelectedRowIndex + 1].Selected = true;
gridViewCommand.CurrentCell = gridViewCommand.Rows[SelectedRowIndex +
1].Cells[0];
}
private void
btnClear_Click(object sender, EventArgs e)
{
DialogResult result = MessageBox.Show("Are You Sure?", "Clear All Data",
MessageBoxButtons.YesNo, MessageBoxIcon.Question);
if (result == DialogResult.Yes)
{
commandTable.Clear();
}
}
int playStep = 0;
private void
btnPlay_Click(object sender, EventArgs e)
{
if (btnPlay.Text == "Play")
{
btnPlay.Text = "Stop";
playStep = -1;
btnAddNew.Enabled = false;
btnDelete.Enabled = false;
btnMoveDown.Enabled = false;
btnMoveUp.Enabled = false;
btnClear.Enabled = false;
btnLoad.Enabled = false;
btnSave.Enabled = false;
btnSaveArduino.Enabled = false;
hScrollBar0.Enabled = false;
hScrollBar1.Enabled = false;
hScrollBar2.Enabled = false;
hScrollBar3.Enabled = false;
hScrollBar4.Enabled = false;
hScrollBar5.Enabled = false;
hScrollBar6.Enabled = false;
hScrollBar7.Enabled = false;
hScrollBar8.Enabled = false;
hScrollBar9.Enabled = false;
hScrollBar10.Enabled = false;
hScrollBar11.Enabled = false;
hScrollBarTime.Enabled = false;
timerPlay.Enabled = true;
}
else
{
btnPlay.Text = "Play";
timerPlay.Enabled = false;
btnAddNew.Enabled = true;
btnDelete.Enabled = true;
btnMoveDown.Enabled = true;
btnMoveUp.Enabled = true;
btnClear.Enabled = true;
btnLoad.Enabled = true;
btnSave.Enabled = true;
btnSaveArduino.Enabled
= true;
hScrollBar0.Enabled = true;
hScrollBar1.Enabled = true;
hScrollBar2.Enabled = true;
hScrollBar3.Enabled = true;
hScrollBar4.Enabled = true;
hScrollBar5.Enabled = true;
hScrollBar6.Enabled = true;
hScrollBar7.Enabled = true;
hScrollBar8.Enabled = true;
hScrollBar9.Enabled = true;
hScrollBar10.Enabled = true;
hScrollBar11.Enabled = true;
hScrollBarTime.Enabled = true;
}
}
private void
btnSave_Click(object sender, EventArgs e)
{
SaveFileDialog dialog = new
SaveFileDialog();
dialog.Filter = "save files
(*.Spider)|*.Spider|All files (*.*)|*.*"; //設定Filter,過濾檔案
//dialog.InitialDirectory = "C:"; //設定起始目錄為C:\
//dialog.InitialDirectory = Application.StartupPath; //設定起始目錄為程式目錄
dialog.Title
= "Select a save file"; //設定dialog的Title
if (dialog.ShowDialog() == DialogResult.OK)
{
StreamWriter outfile = new
StreamWriter(dialog.FileName, false, System.Text.Encoding.Default);
string title = "";
for (int column=0;
column<12; column++)
{
title += commandTable.Columns[column].ColumnName + ",";
}
title += commandTable.Columns[12].ColumnName;
outfile.WriteLine(title);
foreach (DataRow
row in commandTable.Rows)
{
string data = "";
for (int
column = 0; column < 12; column++)
{
data +=
row[column].ToString().Trim() + ",";
}
data += row[12].ToString().Trim();
outfile.WriteLine(data);
}
outfile.Dispose();
outfile.Close();
}
}
private void
btnLoad_Click(object sender, EventArgs e)
{
OpenFileDialog dialog = new
OpenFileDialog();
dialog.Filter = "open files
(*.Spider)|*.Spider|All files (*.*)|*.*"; //設定Filter,過濾檔案
//dialog.InitialDirectory = "C:"; //設定起始目錄為C:\
//dialog.InitialDirectory = Application.StartupPath; //設定起始目錄為程式目錄
dialog.Title = "Select a file"; //設定dialog的Title
if (dialog.ShowDialog() == DialogResult.OK)
{
StreamReader infile = new
StreamReader(dialog.FileName);
string[] stringSeparators = new string[] { "," };
commandTable.Clear();
String Line;
infile.ReadLine(); // skip header
while ((Line = infile.ReadLine()) != null)
{
commandTable.Rows.Add();
DataRow row =
commandTable.Rows[commandTable.Rows.Count - 1];
String[] Item =
Line.Split(stringSeparators, StringSplitOptions.None);
row[0] = Convert.ToInt16(Item[0]);
for (int
i = 0; i < 12; i++)
{
row[i + 1] = Convert.ToInt16(Item[i]);
}
}
infile.Dispose();
infile.Close();
}
}
private void
btnSaveArduino_Click(object sender, EventArgs e)
{
SaveFileDialog dialog = new
SaveFileDialog();
dialog.Filter = "save files
(*.C)|*.C|All files (*.*)|*.*"; //設定Filter,過濾檔案
//dialog.InitialDirectory = "C:"; //設定起始目錄為C:\
//dialog.InitialDirectory = Application.StartupPath; //設定起始目錄為程式目錄
dialog.Title = "Select a save
file"; //設定dialog的Title
if (dialog.ShowDialog() == DialogResult.OK)
{
StreamWriter outfile = new
StreamWriter(dialog.FileName, false, System.Text.Encoding.Default);
outfile.WriteLine("#define
Steps" + commandTable.Rows.Count);
outfile.WriteLine("int
spiderMove[] = {");
string data;
for (int row = 0;
row < commandTable.Rows.Count; row++ )
{
data = " ";
for (int
column = 0; column < 13; column++)
{
data += String.Format("{0,4},",
commandTable.Rows[row][column]);
}
outfile.WriteLine(data);
}
outfile.WriteLine("};");
outfile.Dispose();
outfile.Close();
}
}
private void
timerPlay_Tick(object sender, EventArgs e)
{
timerPlay.Enabled = false; //stop timer to
send command
int lastStep = (playStep - 1 +
commandTable.Rows.Count) % commandTable.Rows.Count;
for (int id = 0; id
< 12; id++)
{
if (playStep<0) {
sendCommand(String.Format("$M{0:00}A{1:000}#", id,
commandTable.Rows[0][id+1]));
}
else if
(commandTable.Rows[playStep][id + 1] != commandTable.Rows[lastStep][id + 1])
{
sendCommand(String.Format("$M{0:00}A{1:000}#", id,
commandTable.Rows[playStep][id + 1]));
}
}
if (playStep<0) playStep=0;
for (int i = 0; i
< commandTable.Rows.Count; i++)
{
gridViewCommand.Rows[i].Selected = false;
}
gridViewCommand.Rows[playStep].Selected = true;
timerPlay.Interval = Convert.ToInt16(commandTable.Rows[playStep][0]);
timerPlay.Enabled = true; //restart timer
if (++playStep >= commandTable.Rows.Count)
{
playStep = 0;
}
}
private void
btnReset_Click(object sender, EventArgs e)
{
hScrollBar0.Value = 90;
hScrollBar1.Value = 90;
hScrollBar2.Value = 90;
hScrollBar3.Value = 90;
hScrollBar4.Value = 90;
hScrollBar5.Value = 90;
hScrollBar6.Value = 90;
hScrollBar7.Value = 90;
hScrollBar8.Value = 90;
hScrollBar9.Value = 90;
hScrollBar10.Value = 90;
hScrollBar11.Value = 90;
hScrollBarTime.Value = 25;
for (int id=0;
id<12; id++) {
Update_UI_Angle(id);
sendCommand(motorCommand(id));
}
Update_UI_Time();
}
}
}
|
沒有留言:
張貼留言